Intimacy at a distance
For the second semester course of my masters Designing Wearables, I wanted to explore how wearable design could support people in showing care and affection when touch-aversion hinders close physical contact. I took an auto-ethnographic approach, centering the work in my own experiences of intimacy and touch-aversion in an autistic relationship. The result was the first NonHug prototype. Feeling the project had legs, I worked on another iteration in a project course through the fall semester.
Concept
The Non-Hug is a set of wearable compression garments, worn together by people in a close relationship. Though a shared gesture of placing a hand on the chest, the wearables apply a comforting compression in synchronisation. This allows for emulation of a hug at a distance, while maintaining the social agency of physical contact.
NonHug V1
Due to the limited time of the course, this first iteration impements a purely self-activated compression through inflation:

A leather chestplate and back plate are strapped to the body using ribbons over the shoulders and around the waist. Buckles allow adjusting the ribbons to a reasonably tight fit. Through inflation of a cast silicone pouch underneath the chestplate, the wearable can provide a comforting pressure on the sternum. The heart graphic on the front of the wearable consists of two copper surfaces, which form a resistive touch sensor. A darlington array amplifies the current across the surfaces to drive an air pump, which inflates the silicone pouch. A simple regulator prevents the puch from popping from overinflation.



A short term evaluation of the prototype uncovered some issues. The main three were:
- Trouble with long-term fit: The wearable must sit quite tight to the body for the compression to be felt significantly. With the ribbon-placements, a tight fit will creep upwards over time, gnawing into the the ribs.
- Issues with componentry choice and placement: The air pump used for the prototype is rather heavy and bulky. Its placement on the back hinders comfortably leaning back in most chairs. For daily wear, smaller and lighter components are needed.
- Noise issues: In an already touch averse situation, sudden noices are generally not appreciated. The relatively loud whirr of the air pump and whistle of the regulator are uncomfortable. In sensitive situations, silent actuation is necessary.
Further, to examine social interaction through the wearable, wireless communication must be implemented.
NonHug V2
 So as noted, I continued this project through the following semester to try and remedy some of these issues. I ended up with a smaller design fitting over the chest, and using muscle wire for compression.
So as noted, I continued this project through the following semester to try and remedy some of these issues. I ended up with a smaller design fitting over the chest, and using muscle wire for compression.
The second NonHug iteration replaces the leather parts of the first with soft 3d prints encased in foam and cotton, and is strapped under the arms instead of around the waist. On the back, a meter of muscle wire sits rolled up in a casette, attaching to the under-arm ribbons at each end. When the wire is powered, it pulls the ribbons together, a distance of around 4 cm. At the front, the ribbons attach to a 3d printed mechanism, which expands and pushes in on the sternum when pulled. The wearable still uses resistive touch sensing, but through a conductive embroidery instead of adhesive copper. Sensing and actuation of the wire is controlled by an ESP8266 based board, which meshes with other prototypies in the area, to actuate together.

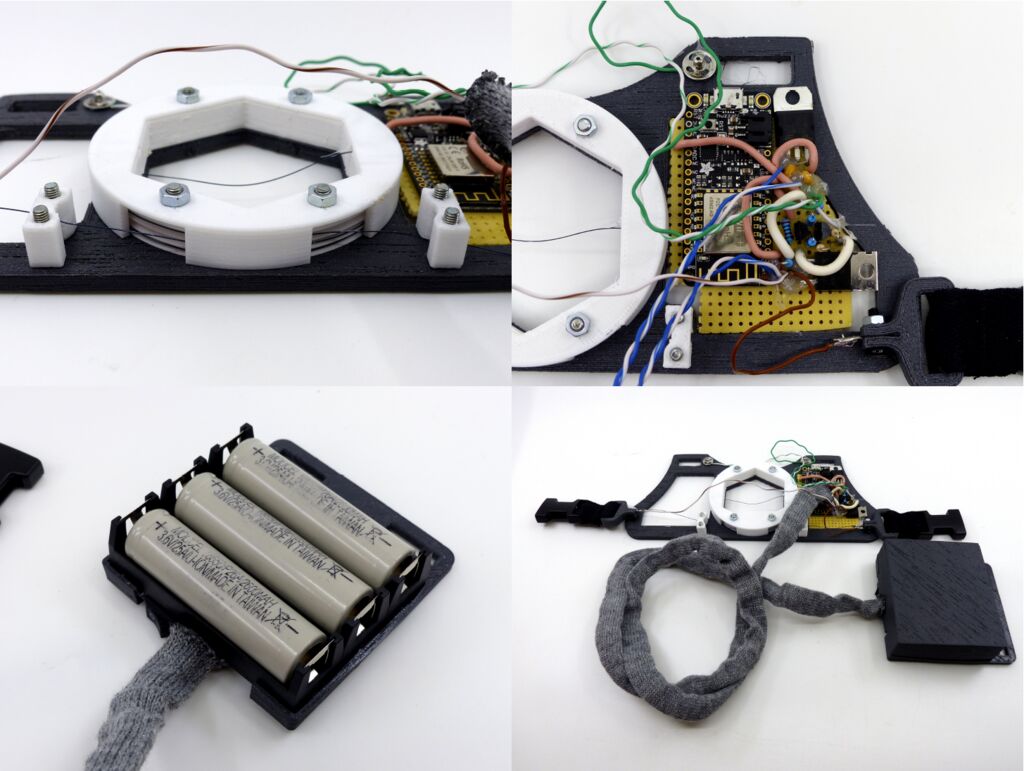

The new fit and reduced volume of the control and drive circuit made it possible to wear the prototype for hours without much trouble. Further the use of muscle wire made actuation completely silent. However, while the force and pull of the muscle wire is quite significant, the high friction of the ribbons on cloth distributed the force across the entire torso, making the experienced compression rather weak. Along with internal friction, this also prevented the front mechanism from actuating.
What now
With a bit of luck, i will be producing a third iteration on the project in the not too distant future. More to follow on that. Project reports have been produced for each of the iterations: A shorter report for the first iteration can be found here, while a longer report, also featuring a literature review for wearable design for autism, can be found here.
